-
硬核守護(hù)!iok 儲(chǔ)能電池箱體:解鎖安全與高效的雙重密碼
-
設(shè)計(jì),生產(chǎn),采購(gòu),銷售人員都應(yīng)了解的常識(shí)
-
iok壁掛式儲(chǔ)能機(jī)箱:指引家庭儲(chǔ)能新時(shí)代,打開綠色生活新篇章
-
iok刀片式服務(wù)器機(jī)箱:精密架構(gòu)賦能未來(lái)計(jì)算
-
iok品牌機(jī)架式服務(wù)器機(jī)箱:現(xiàn)代化數(shù)據(jù)中心新潮流
-
定制工控機(jī)箱需要關(guān)注的設(shè)計(jì)細(xì)節(jié)
-
iok 服務(wù)器機(jī)箱:企業(yè)數(shù)據(jù)存儲(chǔ)的堅(jiān)實(shí)后盾
-
ioK工控機(jī)箱:穩(wěn)固支撐,驅(qū)動(dòng)工業(yè)創(chuàng)新的智慧引擎
-
革新設(shè)計(jì),東莞 iok 推出全新新能源逆變器機(jī)箱
蕪湖運(yùn)動(dòng)控制廠家
S型加減速算法通過(guò)引入加加速度(jerk,加速度的變化率)實(shí)現(xiàn)加速度的平滑過(guò)渡,避免運(yùn)動(dòng)沖擊,適用于精密裝配設(shè)備(如芯片貼裝機(jī)),其運(yùn)動(dòng)過(guò)程分為加加速段(j>0)、減加速段(j<0)、勻速段、加減速段(j<0)、減減速段(j>0),編程時(shí)需通過(guò)分段函數(shù)計(jì)算各階段的加速度、速度與位移,例如在加加速段,加速度a=jt,速度v=0.5j*t2,位移s=(1/6)jt3。為簡(jiǎn)化編程,可借助運(yùn)動(dòng)控制庫(kù)(如MATLAB的RoboticsToolbox)預(yù)計(jì)算軌跡參數(shù),再將參數(shù)導(dǎo)入非標(biāo)設(shè)備的控制程序中。此外,軌跡規(guī)劃算法實(shí)現(xiàn)需考慮硬件性能:如伺服電機(jī)的加速度、運(yùn)動(dòng)控制卡的脈沖輸出頻率,避免設(shè)定的參數(shù)超過(guò)硬件極限導(dǎo)致失步或過(guò)載。安徽包裝運(yùn)動(dòng)控制廠家。蕪湖運(yùn)動(dòng)控制廠家
此外,食品包裝設(shè)備對(duì)衛(wèi)生安全要求極高,運(yùn)動(dòng)控制相關(guān)的電氣部件需具備防水、防塵、防腐蝕性能,以適應(yīng)清洗消毒環(huán)境;機(jī)械傳動(dòng)部件則需采用食品級(jí)潤(rùn)滑油,避免對(duì)食品造成污染。在運(yùn)動(dòng)控制方案設(shè)計(jì)中,還需考慮設(shè)備的易清潔性,盡量減少傳動(dòng)部件的死角,便于日常清洗維護(hù)。同時(shí),為應(yīng)對(duì)不同規(guī)格食品的包裝需求,運(yùn)動(dòng)控制系統(tǒng)需具備快速換型功能,操作人員通過(guò)人機(jī)界面選擇相應(yīng)的產(chǎn)品配方,系統(tǒng)可自動(dòng)調(diào)整各軸的運(yùn)動(dòng)參數(shù),如牽引速度、切割長(zhǎng)度等,無(wú)需手動(dòng)調(diào)整機(jī)械結(jié)構(gòu),大幅縮短換型時(shí)間,提升設(shè)備的柔性生產(chǎn)能力。鎮(zhèn)江絲網(wǎng)印刷運(yùn)動(dòng)控制開發(fā)嘉興包裝運(yùn)動(dòng)控制廠家。
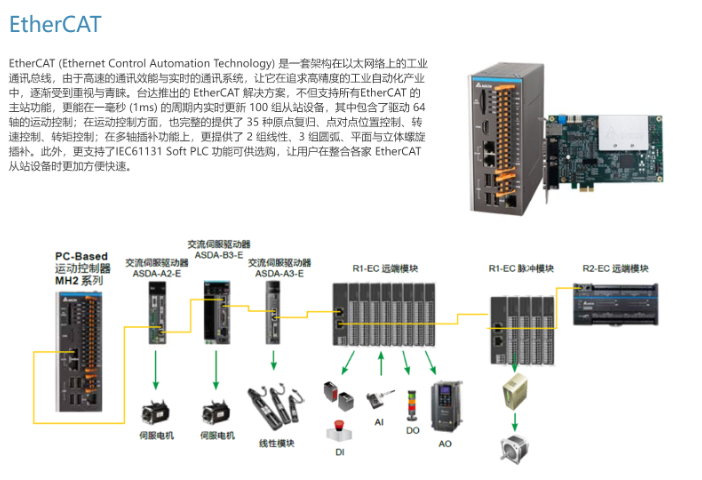
非標(biāo)自動(dòng)化運(yùn)動(dòng)控制編程中的伺服參數(shù)匹配與優(yōu)化是確保軸運(yùn)動(dòng)精度與穩(wěn)定性的關(guān)鍵步驟,需通過(guò)代碼實(shí)現(xiàn)伺服驅(qū)動(dòng)器的參數(shù)讀取、寫入與動(dòng)態(tài)調(diào)整,適配不同負(fù)載特性(如重型負(fù)載、輕型負(fù)載)與運(yùn)動(dòng)場(chǎng)景(如定位、軌跡跟蹤)。伺服參數(shù)主要包括位置環(huán)增益(Kp)、速度環(huán)增益(Kv)、積分時(shí)間(Ti),這些參數(shù)直接影響伺服系統(tǒng)的響應(yīng)速度與抗干擾能力:位置環(huán)增益越高,定位精度越高,但易導(dǎo)致振動(dòng);速度環(huán)增益越高,速度響應(yīng)越快,但穩(wěn)定性下降。在編程實(shí)現(xiàn)時(shí),首先需通過(guò)通信協(xié)議(如RS485、EtherCAT)讀取伺服驅(qū)動(dòng)器的當(dāng)前參數(shù),例如通過(guò)Modbus協(xié)議發(fā)送0x03功能碼(讀取保持寄存器),地址0x2000(位置環(huán)增益),獲取當(dāng)前Kp值;接著根據(jù)設(shè)備的負(fù)載特性調(diào)整參數(shù):如重型負(fù)載(如搬運(yùn)機(jī)器人)需降低Kp(如設(shè)為200)、Kv(如設(shè)為100),避免電機(jī)過(guò)載;輕型負(fù)載(如點(diǎn)膠機(jī))可提高Kp(如設(shè)為500)、Kv(如設(shè)為300),提升響應(yīng)速度。參數(shù)調(diào)整后,通過(guò)代碼進(jìn)行動(dòng)態(tài)測(cè)試:控制軸進(jìn)行多次定位運(yùn)動(dòng)(如從0mm移動(dòng)至100mm,重復(fù)10次),記錄每次的定位誤差,若誤差超過(guò)0.001mm,則進(jìn)一步優(yōu)化參數(shù)(如微調(diào)Kp±50),直至誤差滿足要求。
在多軸聯(lián)動(dòng)機(jī)器人編程中,若需實(shí)現(xiàn)“X-Y-Z-A四軸聯(lián)動(dòng)”的空間曲線軌跡,編程步驟如下:首先通過(guò)SDK初始化運(yùn)動(dòng)控制卡(設(shè)置軸使能、脈沖模式、加速度限制),例如調(diào)用MC_SetAxisEnable(1,TRUE)(使能X軸),MC_SetPulseMode(1,PULSE_DIR)(X軸采用脈沖+方向模式);接著定義軌跡參數(shù)(如曲線的起點(diǎn)坐標(biāo)(0,0,0,0),終點(diǎn)坐標(biāo)(100,50,30,90),速度50mm/s,加速度200mm/s2),通過(guò)MC_MoveLinearInterp(1,100,50,30,90,50,200)函數(shù)實(shí)現(xiàn)四軸直線插補(bǔ);在運(yùn)動(dòng)過(guò)程中,通過(guò)MC_GetAxisPosition(1,&posX)實(shí)時(shí)讀取各軸位置(如X軸當(dāng)前位置posX),若發(fā)現(xiàn)位置偏差超過(guò)0.001mm,調(diào)用MC_SetPositionCorrection(1,-posX)進(jìn)行動(dòng)態(tài)補(bǔ)償。此外,運(yùn)動(dòng)控制卡編程還需處理多軸同步誤差:例如通過(guò)MC_SetSyncAxis(1,2,3,4)(將X、Y、Z、A軸設(shè)為同步組),確保各軸的運(yùn)動(dòng)指令同時(shí)發(fā)送,避免因指令延遲導(dǎo)致的軌跡偏移。為保障編程穩(wěn)定性,需加入錯(cuò)誤檢測(cè)機(jī)制:如調(diào)用MC_GetErrorStatus(&errCode)獲取錯(cuò)誤代碼,若errCode=0x0003(軸超程),則立即調(diào)用MC_StopAllAxis(STOP_EMERGENCY)(緊急停止所有軸),并輸出報(bào)警信息。滁州鉆床運(yùn)動(dòng)控制廠家。

磨床的恒壓力磨削控制技術(shù)在薄壁、易變形工件(如鋁合金殼體、銅制薄片)加工中發(fā)揮關(guān)鍵作用,其是保證磨削過(guò)程中砂輪對(duì)工件的壓力恒定,避免工件因受力不均導(dǎo)致的變形。薄壁工件的壁厚通常小于5mm(如手機(jī)中框壁厚1.5mm),磨削時(shí)若壓力過(guò)大(超過(guò)50N),易產(chǎn)生彎曲變形(變形量>0.01mm),影響尺寸精度;壓力過(guò)小則磨削效率低,表面易出現(xiàn)劃痕。恒壓力控制通過(guò)以下方式實(shí)現(xiàn):在Z軸(砂輪進(jìn)給軸)上安裝力傳感器,實(shí)時(shí)采集砂輪與工件的接觸壓力,當(dāng)壓力偏離預(yù)設(shè)值(如30±5N)時(shí),系統(tǒng)調(diào)整Z軸進(jìn)給速度——壓力過(guò)大時(shí)降低進(jìn)給速度(如從0.005mm/s降至0.003mm/s),壓力過(guò)小時(shí)提升進(jìn)給速度,確保壓力穩(wěn)定在設(shè)定范圍。例如加工厚度2mm、直徑100mm的鋁合金薄片時(shí),預(yù)設(shè)磨削壓力25N,系統(tǒng)通過(guò)力傳感器反饋實(shí)時(shí)調(diào)整Z軸進(jìn)給,終薄片的平面度誤差≤0.003mm,厚度公差控制在±0.005mm,相比傳統(tǒng)恒進(jìn)給磨削,變形量減少60%以上。此外,恒壓力控制還可用于砂輪的“無(wú)火花磨削”階段:磨削后期,降低壓力(如5-10N),以極低的進(jìn)給速度進(jìn)行拋光,進(jìn)一步提升工件表面質(zhì)量(粗糙度從Ra0.4μm降至Ra0.1μm)。嘉興磨床運(yùn)動(dòng)控制廠家。揚(yáng)州曲面印刷運(yùn)動(dòng)控制
南京鉆床運(yùn)動(dòng)控制廠家。蕪湖運(yùn)動(dòng)控制廠家
數(shù)控磨床的自動(dòng)上下料運(yùn)動(dòng)控制是實(shí)現(xiàn)批量生產(chǎn)自動(dòng)化的,尤其在汽車零部件、軸承等大批量磨削場(chǎng)景中,可大幅減少人工干預(yù),提升生產(chǎn)效率。自動(dòng)上下料系統(tǒng)通常包括機(jī)械手(或機(jī)器人)、工件輸送線與磨床的定位機(jī)構(gòu),運(yùn)動(dòng)控制的是實(shí)現(xiàn)機(jī)械手與磨床工作臺(tái)、主軸的協(xié)同工作。以軸承內(nèi)圈磨削為例,自動(dòng)上下料流程如下:①輸送線將待加工內(nèi)圈送至機(jī)械手抓取位置→②機(jī)械手通過(guò)視覺(jué)定位(精度±0.01mm)抓取內(nèi)圈,移動(dòng)至磨床頭架與尾座之間→③頭架與尾座夾緊內(nèi)圈,機(jī)械手松開并返回原位→④磨床完成磨削后,頭架與尾座松開→⑤機(jī)械手抓取加工完成的內(nèi)圈,送至出料輸送線→⑥系統(tǒng)返回初始狀態(tài),準(zhǔn)備下一次上下料。為保證上下料精度,機(jī)械手采用伺服電機(jī)驅(qū)動(dòng)(定位精度±0.005mm),配備力傳感器避免抓取時(shí)工件變形(抓取力控制在10-30N);同時(shí),磨床工作臺(tái)需通過(guò)“零點(diǎn)定位”功能,每次加工前自動(dòng)返回預(yù)設(shè)零點(diǎn)(定位精度±0.001mm),確保機(jī)械手放置工件的位置一致性。在批量加工軸承內(nèi)圈(φ50mm,批量1000件)時(shí),自動(dòng)上下料系統(tǒng)的節(jié)拍時(shí)間可控制在30秒/件,相比人工上下料(60秒/件),效率提升100%,且工件裝夾誤差從±0.005mm降至±0.002mm,提升了磨削精度穩(wěn)定性。蕪湖運(yùn)動(dòng)控制廠家
- 南通碳纖維運(yùn)動(dòng)控制定制開發(fā) 2025-12-07
- 常州絲網(wǎng)印刷運(yùn)動(dòng)控制定制開發(fā) 2025-12-07
- 上海半導(dǎo)體運(yùn)動(dòng)控制調(diào)試 2025-12-07
- 嘉興復(fù)合材料運(yùn)動(dòng)控制廠家 2025-12-07
- 南京鋁型材運(yùn)動(dòng)控制調(diào)試 2025-12-07
- 常州木工運(yùn)動(dòng)控制編程 2025-12-07
- 安徽涂膠運(yùn)動(dòng)控制廠家 2025-12-07
- 杭州運(yùn)動(dòng)控制編程 2025-12-07
- 嘉興鎂鋁合金運(yùn)動(dòng)控制編程 2025-12-07
- 連云港碳纖維運(yùn)動(dòng)控制定制 2025-12-07
- 閔行區(qū)本地電力電子元器件銷售客服電話 2025-12-07
- 荊州醫(yī)院led叫號(hào)屏供應(yīng) 2025-12-07
- 禮堂中控矩陣系統(tǒng)廠家 2025-12-07
- 閔行區(qū)質(zhì)量電子產(chǎn)品銷售銷售價(jià)格 2025-12-07
- 蘇州通孔DIP插件量產(chǎn) 2025-12-07
- HTCC電子元器件鍍金廠家 2025-12-07
- CAK37F-25V-50000uF-K-S7 2025-12-07
- 蘇州前清洗噴砂線報(bào)價(jià) 2025-12-07
- 四川進(jìn)口汽車連接器品牌 2025-12-07
- 天津敞開式溫度開關(guān)廠商 2025-12-07